Vehicle Dynamics
Last year, as a member of Olin Electric Motorsports, I designed the rear suspension geometry of Mk.III, an electric FSAE car. This year I am working on the redesign of the suspension geometry and chassis of Mk.IV.

I am a senior mechanical engineering student at Olin College of Engineering, looking for full-time opportunities. I am interested in analysis driven mechanical design, vehicle dynamics, and DFMA.I am passionate about the development of renewable energy generation, sustainable energy storage methods, and electric vehicles.
Last year, as a member of Olin Electric Motorsports, I designed the rear suspension geometry of Mk.III, an electric FSAE car. This year I am working on the redesign of the suspension geometry and chassis of Mk.IV.
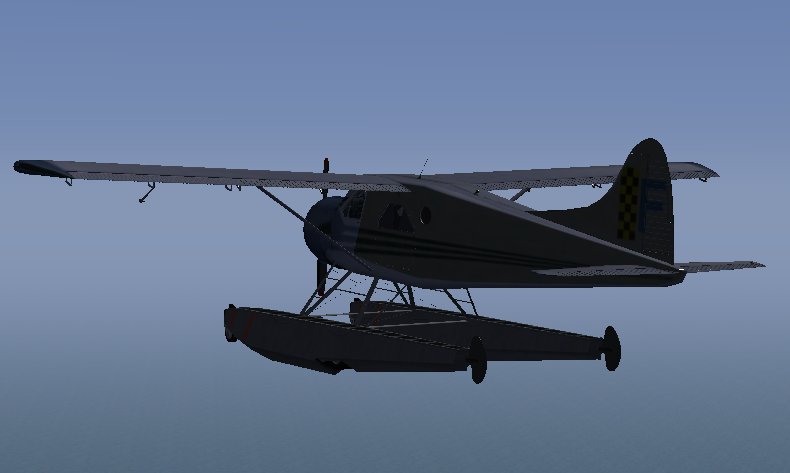
As part of my Quantitative Engineering Analysis class, in a team of two, we designed a controls algorithm to allow a DeHavilland Canada Beaver to achieve steady state flight. In this 3 week long project, we managed to managed to get the plane to fly towards North at a constant speed.

As part of my Quantitative Engineering Analysis class, in a team of two, we modelled an inverted pendulum and wrote a PI controller to allow a Pololu Balboa to stand up and remain in its position without drifting, once it was propped up. By the end the project, our robot could stand up without drifting for more than 45 minutes.
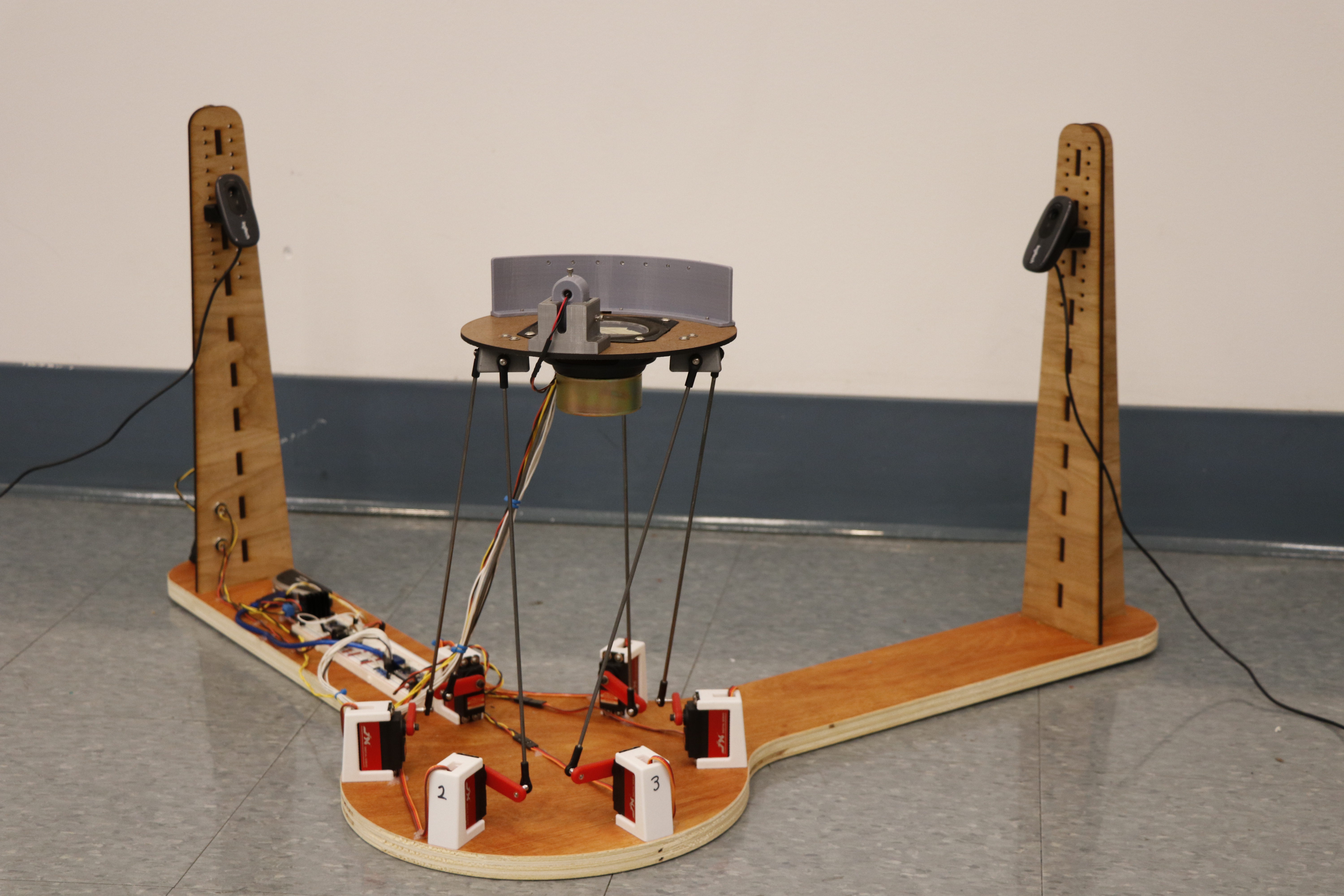
For 8 weeks, I was part of a five people team, dedicated to making a stewart platform bounce a ping pong ball indefinitely with a budget of 250 USD. At the end, we managed to bounce a ping pong ball for 30 minutes, before stopping, due to poor lighting conditions.
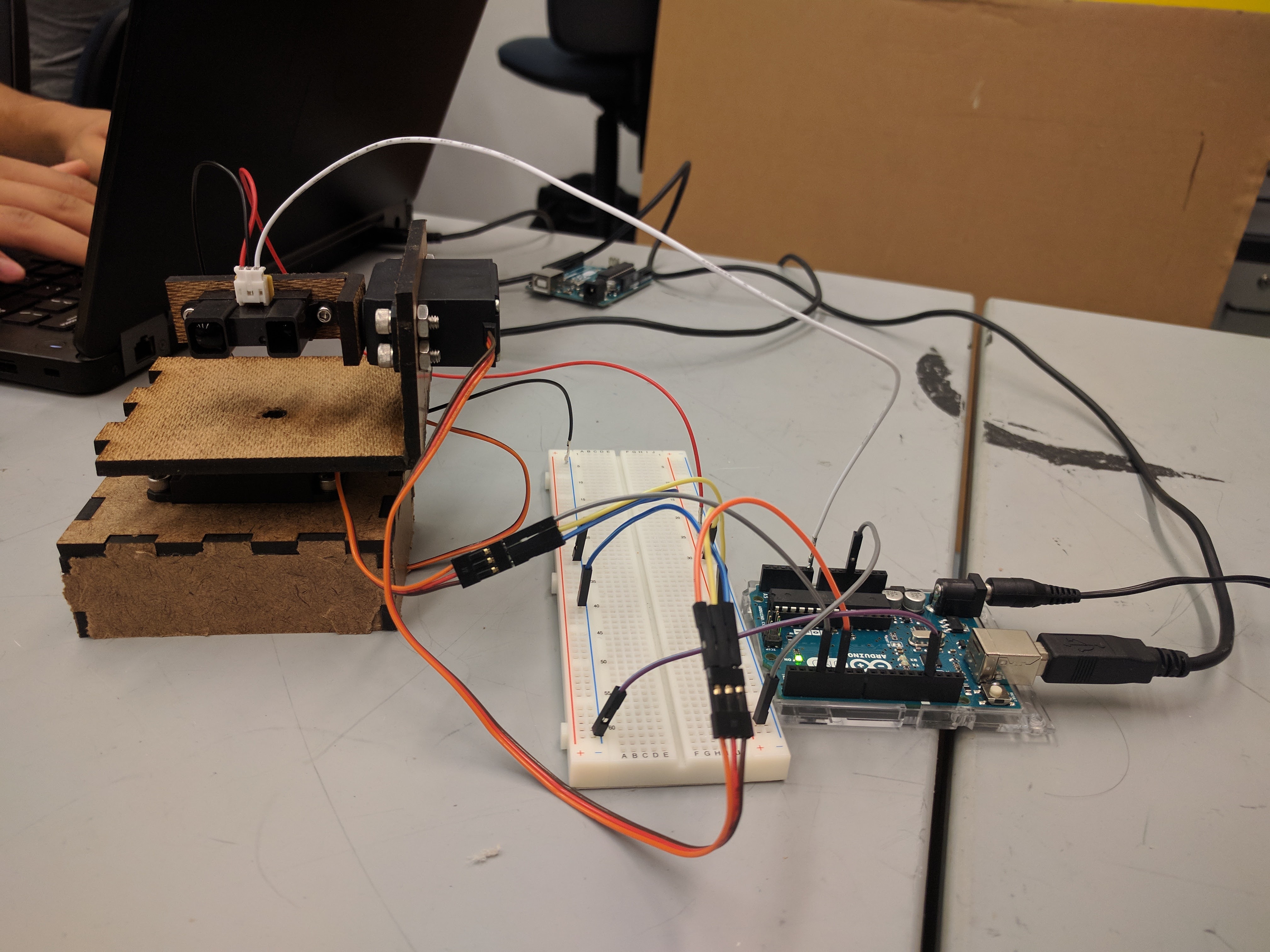
As part of my Principles of Engineering class, in a team of two, we built a 3D Scanner out of an IR distance sensor and a pan-tilt mechanism - built out of servo motors. Managed to get a 3D plot of a cardboard cutout of the letter "W" - for William, my partner.
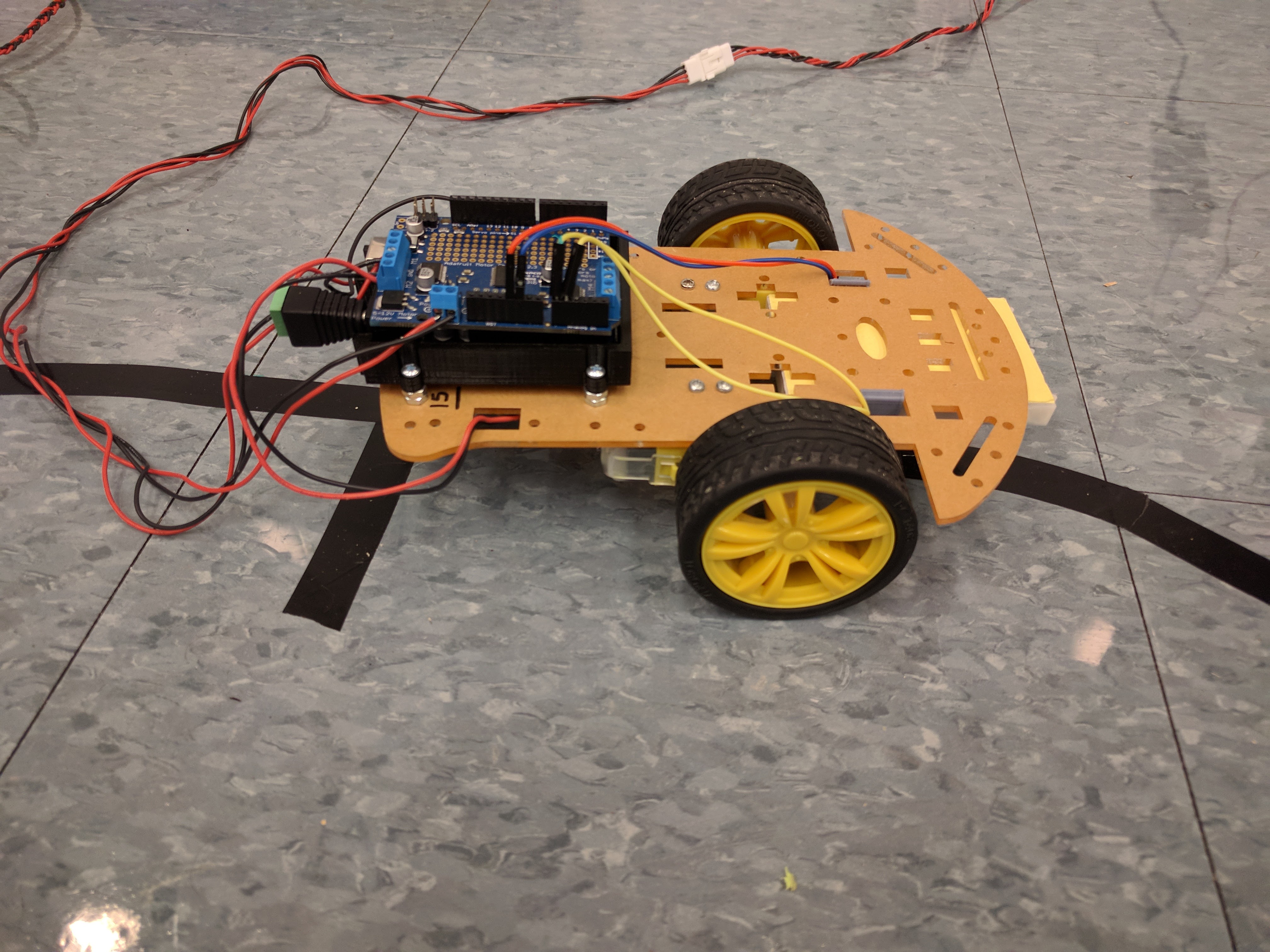
As part of my Principles of Engineering class, in a team of two, we built a PID controlled robot that can follow a certain path on the floor, drawn with black tape.
Along with designing the motor and sensor mounts for the robot, I designed parts electrical components, and helped improve the control loop. At the end of the lab, we managed to complete the track in 39 seconds.

As part of my Quantitative Engineering Analysis class, in a team of two, we designed a PI control algorithm for a babywarmer device that can be used in the developing communities of the world.
We managed to design a system that reaches the desired body temperature fast enough - without any significant error - while limiting the power consumption from the heater.
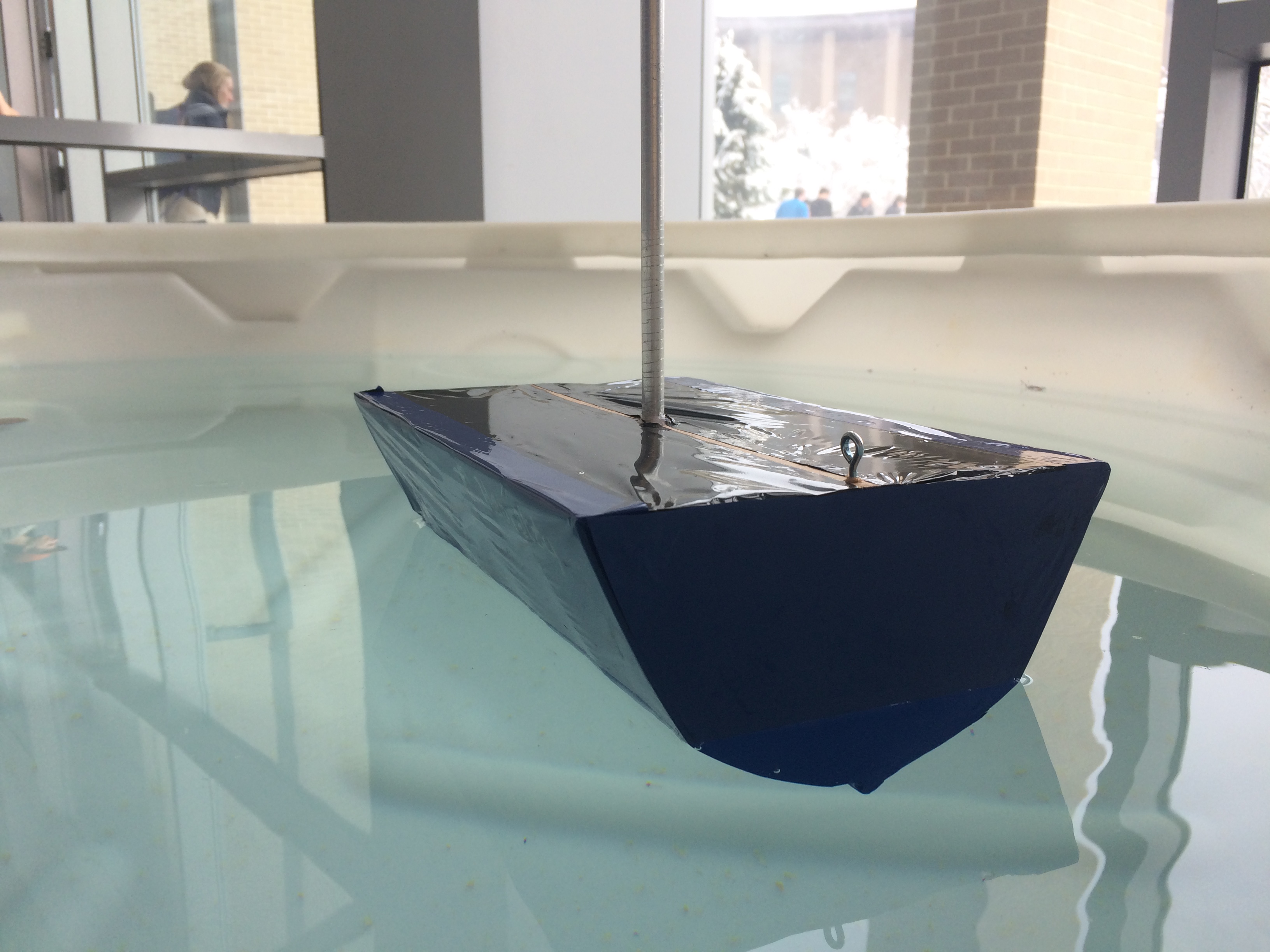
As part of my Quantitative Engineering Analysis class, in a team of two, we built a boat out of shrink wrap and HDF, that floated flat and had an angle of vanishing stability(AVS) between 120 to 140 degrees.
We used Mathematica to do a 3D model of the boat and optimize for the right dimensions to float flat and have the right AVS angle, designed the parts in Solidworks laser-cut the parts and did the assembly, within a week.
As part of my Quantitative Engineering Analysis class, in a team of two, built an algorithm that translates a conductor's movements to visually impaired musicians.
Using Fourier Analysis and MATLAB Mobile, we extracted tempo, volume and cues from
accelerometer data that we received from a smartphone, strapped to the conductor's hand.
As part of my Software Design class, in a team of five, built an app
that takes any image, pixelizes it and rebuilds it using Lego bricks,
along with a bill of materials. Being a person, who has never programmed before coming to Olin, this project
was my first major programming challenge. I primarily worked in the pixelation
and Lego rebuild algorithms. For my Quantitative Engineering Analysis calss, in groups of two, I did three mini projects,
that focused on programming a Neato robot, to do follow a prescribed path, go up a hill using gradient
ascent and going through an obstacle course to a designated destination.Team Leggo

Roboptimization